Exporteren naar OpenDRIVE / OpenSCENARIO / esmini
drawtonomy zet een handgetekende scène om naar een ASAM
OpenDRIVE (.xodr)
wegnetwerk plus een
OpenSCENARIO (.xosc)
scenario, gebundeld in één zip die je direct kunt afspelen in
esmini.
De conversie is bewust beperkt — hij dekt alleen de vormen die netjes op het ASAM-datamodel passen en laat de rest weg. Op deze pagina staat precies wat er wordt geconverteerd, wat het geëxporteerde voertuig feitelijk doet en wat buiten scope valt, zodat de uitvoer nooit te veel belooft.
Bekijk de volledige ronde trip
Section titled “Bekijk de volledige ronde trip”De video hieronder is één opname: teken een kruispunt, teken een pad, genereer footprints, exporteer de esmini-zip en speel de geëxporteerde .xosc af in esmini.
Exporteren vanuit de editor
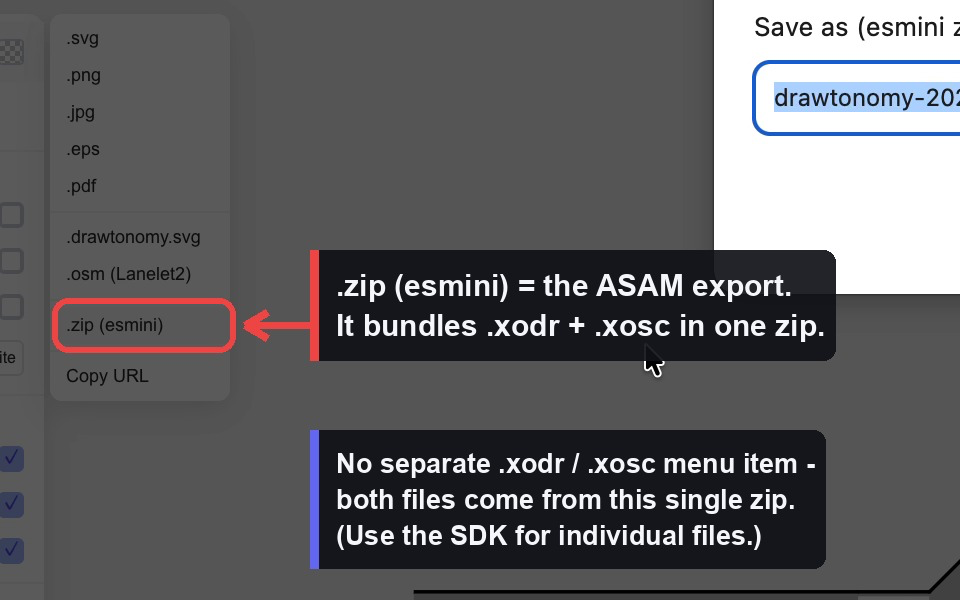
Section titled “Exporteren vanuit de editor”Er is één ASAM-exportoptie. drawtonomy heeft geen aparte menu-items voor .xodr en .xosc — beide bestanden worden samen aangemaakt en in één zip verpakt.
- Teken je scène (rijstroken, een kruispunt, voertuigen, een pad…).
- Open het menu → Export →
.zip (esmini). - Voer een basisnaam in wanneer daarom gevraagd wordt (standaard
drawtonomy-<datum>). - Een
<naam>.zipwordt gedownload met daarin<naam>.xodr,<naam>.xoscen de esmini 3D-modelassets waarnaar het scenario verwijst.
De gehele huidige pagina wordt geëxporteerd — er is geen modus voor “alleen selectie” bij het ASAM-doel.
Afspelen in esmini
Section titled “Afspelen in esmini”unzip drawtonomy-2026-05-30.zipcd drawtonomy-2026-05-30esmini --osc drawtonomy-2026-05-30.xosc --window 60 60 1024 768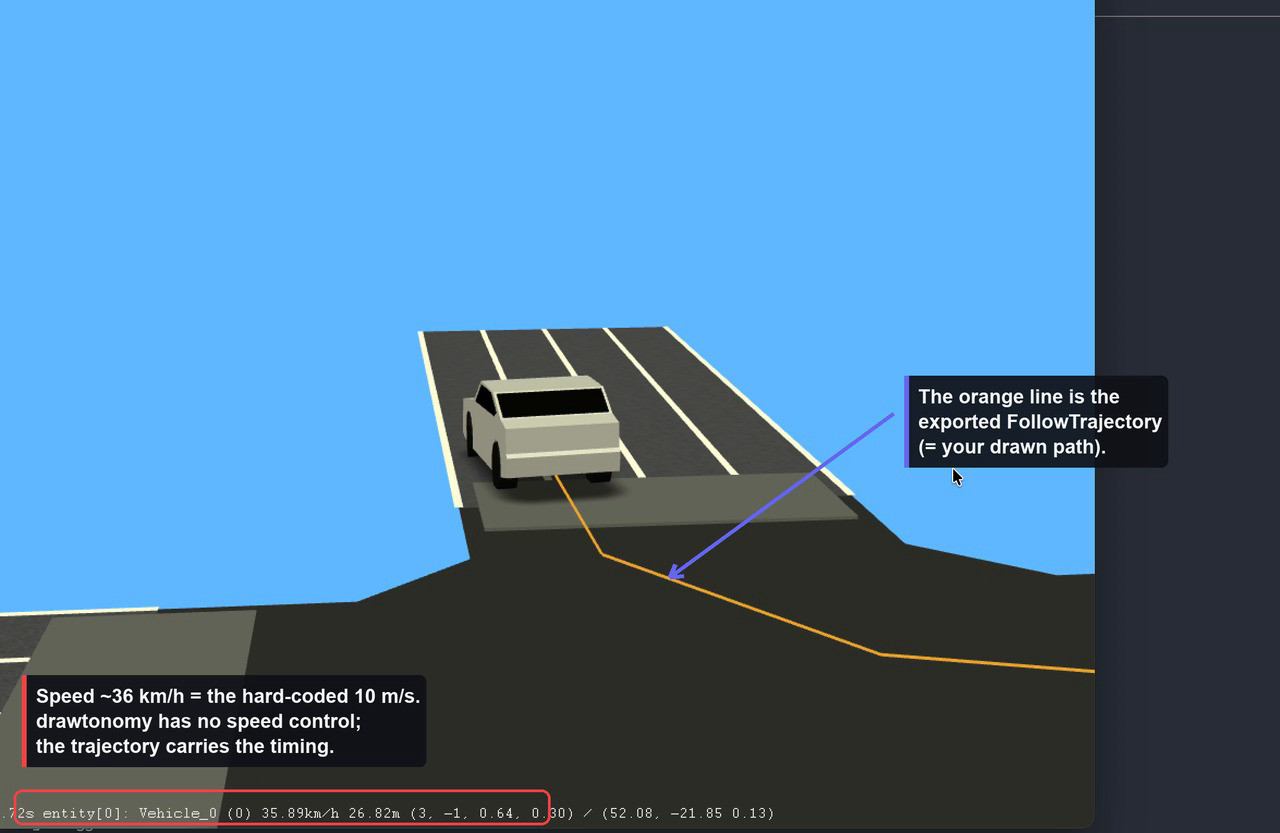
Het voertuig rijdt langs de oranje lijn — die lijn is de FollowTrajectoryAction die uit het door jou getekende pad is gegenereerd.
Wat er wordt geconverteerd
Section titled “Wat er wordt geconverteerd”Naar OpenDRIVE (.xodr)
Section titled “Naar OpenDRIVE (.xodr)”| drawtonomy-vorm | OpenDRIVE-element | Opmerkingen |
|---|---|---|
| Lane | één <road> | 1 rijstrook = 1 zelfstandige weg |
| Traffic light | <signal> op de dichtstbijzijnde weg | alleen voertuig-/voetgangerstype |
| Crosswalk | <object type="crosswalk"> | loodrecht op de weg geplaatst |
| Polygon (≥3 punten) | <object type="patch"> met <outline> | vult kruispunt-/gebiedsvisualisaties |
Alles wat overblijft — voertuigen, voetgangers, losse punten, vrije linestrings, tekst, afbeeldingen — wordt niet in het .xodr-bestand opgenomen.
Hoe ver elke weg loopt:
- De geometrie bestaat uitsluitend uit rechte lijnen. De referentielijn van de weg wordt bemonsterd vanuit de linker- en rechterrand van de rijstrook en uitgestoten als
<line>-segmenten. Er worden geenarc-,spiral- ofpoly3-geometrieën aangemaakt. - Vaste rijstrookindeling. Elke weg krijgt precies één linker rijstrook (
id=1), één middenas (id=0) en één rechter rijstrook (id=-1), allemaaltype="driving". Wegen met meerdere rijstroken en meerdere rijstrookdelen worden niet weergegeven. - Wegmarkeringen zijn vastgezet op een
solid white 0.13 m-lijn. - Geen kruispunten. Elke weg heeft
junction="-1"en er wordt nooit een<junction>-element aangemaakt. Kruispunten worden alleen weergegeven via de polygon-patch (visueel) en via predecessor/successor-koppelingen afgeleid uit denext-/prev-verbindingen van de rijstrook (alleen het eerste item). - Geen hoogteprofiel of superelevatie —
elevationProfileenlateralProfileworden leeg uitgestuurd (vlakke, planaire wegen). - De schaal is vastgezet op 16,67 px/m; de geografische oorsprong is
0.
Naar OpenSCENARIO (.xosc)
Section titled “Naar OpenSCENARIO (.xosc)”| drawtonomy-vorm | OpenSCENARIO-element |
|---|---|
| Vehicle | een <ScenarioObject> (<Vehicle> of <Pedestrian>) |
| Path footprint (het voorste voertuig) | een <FollowTrajectoryAction> |
Een “voetganger” is gewoon een Vehicle-vorm waarvan de sjabloonnaam overeenkomt met een voetgangers-/looppatroon — die wordt als <Pedestrian> uitgestoten in plaats van <Vehicle>. Rijstroken, voetgangersoversteekplaatsen, verkeerslichten en vrije linestrings worden niet in het .xosc opgenomen.
Het geëxporteerde scenario is bewust minimaal:
- Het enige dynamische gedrag is
FollowTrajectoryAction— een tijdgestempelde polylijn. Er zijn geen snelheidsacties, rijstrookwisselingen, reacties op verkeerslichten, botsingspreventie of interactievoorwaarden. - Elke bewegende entiteit begint op
SimulationTime ≥ 0en het scenario heeft een vasteStopTriggerop 60 s.
Hoe een path footprint voertuigbeweging wordt
Section titled “Hoe een path footprint voertuigbeweging wordt”Dit is de kern van de dynamische export, dus het is de moeite waard om precies te zijn.
Een path is een linestring die je tekent, en footprints zijn spookopies van een voertuig die langs die lijn zijn uitgezet (het spoor dat je in de editor ziet). Bij het exporteren:
- Alleen de voorste footprint (de eerste) wordt een bewegend
<ScenarioObject>. De achterliggende spookopies dienen als canvas-preview en worden weggelaten — je krijgt één voertuig dat het hele pad aflegt, geen rij voertuigen. - De controlepunten van het pad worden de trajectpunten in wereld(ENU)-meters.
- Elk punt krijgt een
time, en het resultaat wordt geschreven als een<Trajectory>→<Polyline>van<Vertex time="…">binnen een<FollowTrajectoryAction>.
Snelheid is vast (de belangrijkste beperking)
Section titled “Snelheid is vast (de belangrijkste beperking)”Het traject wordt getimed op een vaste 10 m/s (≈ 36 km/h). drawtonomy heeft geen snelheidsveld in de UI, en de exporter overschrijft de standaard nooit. In esmini zie je de entiteit ~36 km/h rapporteren, ongeacht wat je hebt getekend. Je stelt geen snelheid in — je bepaalt de timing via de indeling van de footprints, zoals hieronder beschreven.
Twee tijdsmodi
Section titled “Twee tijdsmodi”Of de schakelaar “Variable positioning” aan staat, bepaalt hoe de tijd over het traject wordt verdeeld:
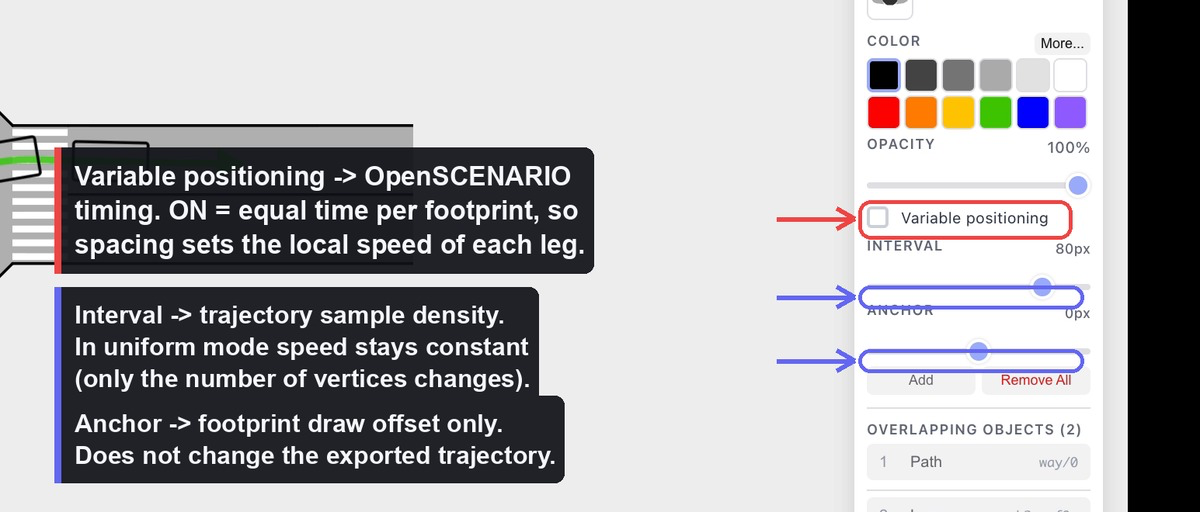
- Uniform (schakelaar UIT) — footprints staan op gelijke booglengte-Intervals en de tijd is
afstand / 10 m/s. De beweging heeft een constante snelheid. Het wijzigen van het Interval verandert alleen het aantal geschreven hoekpunten (bemonsteringsdichtheid); de padvorm en totale duur blijven ongewijzigd. - Variable (schakelaar AAN) — elke footprint is vastgepind op een positie langs het pad, en de totale duur wordt verdeeld in gelijke tijdsvakken tussen de footprints. Waar footprints dicht op elkaar staan, rijdt het voertuig langzaam; waar ze verder uit elkaar staan, rijdt het snel. Dit is de enige manier om de effectieve snelheid langs de route te variëren.
Wat je aanpast ↔ wat er verandert in het .xosc
Section titled “Wat je aanpast ↔ wat er verandert in het .xosc”| Editoractie | Effect op de export |
|---|---|
| Verplaats een controlepunt van het pad | Trajectcoördinaten + totale duur (lengte verandert, snelheid blijft 10 m/s) |
| Sleep een footprint in Variable-modus | De genormaliseerde positie van die footprint → de time van het hoekpunt → de lokale (effectieve) snelheid van dat segment |
| Schakel Variable positioning om | Wisselt tussen gelijke-tijd- en gelijke-snelheidstiming |
| Wijzig Interval (uniforme modus) | Alleen het aantal hoekpunten — trajectvorm en snelheid blijven ongewijzigd |
| Wijzig Anchor | Alleen de tekenverschuiving van de footprint — geen effect op het geëxporteerde traject |
| Wijzig het voertuigsjabloon | vehicleCategory, 3D-model, begrenzingsdooshoogte, prestatiepreset |
| Vergroot of verklein het voertuig (b, h) | BoundingBox-afmetingen en asgeometrie |
| Roteer het voertuig | Beginrichting (alleen als het voertuig geen traject heeft) |
| Verplaats het voertuig | Beginwaarde WorldPosition (vastgemaakt aan het trajectstartpunt als het er een heeft) |
Om de veelgestelde vraag direct te beantwoorden: ja — het verplaatsen van een footprint halverwege het pad in Variable-modus verandert het geëxporteerde snelheidsplan, omdat het dat segment opnieuw timet. Verplaatsen in Uniform-modus, of het wijzigen van de Anchor, heeft dat effect niet.
Vastgeprogrammeerde waarden
Section titled “Vastgeprogrammeerde waarden”Voor eerlijkheid over de scope: de volgende waarden komen uit vaste tabellen of constanten en zijn niet in de editor in te stellen: voertuigcategorie/prestatiepresets, 3D-modelpaden, voertuighoogte per categorie, asgeometrie (afgeleid van afmetingen), volgmodus (position), de stop-trigger op 60 s en — het belangrijkst — de trajectsnelheid van 10 m/s.
Programmatische export
Section titled “Programmatische export”De exporter zit in @drawtonomy/sdk en draait zonder de editor. In tegenstelling tot het menu kun je via de SDK de twee bestanden ook afzonderlijk uitstoten:
import { exporter, createSnapshot } from '@drawtonomy/sdk'
const snapshot = createSnapshot(shapes)
// Gebundeld (zelfde als het menu):const { blob, baseName } = exporter.buildEsminiZip(snapshot, { baseName: 'my-scene',})
// Of elk formaat afzonderlijk:const xodr = exporter.exportToOpenDrive(snapshot)const xosc = exporter.exportToOpenScenario(snapshot, { xodrFilename: 'my-scene.xodr',})Zie voor de volledige API en uitbreidingspunten de Exporter SDK-referentie.
Uitgestoten versies
Section titled “Uitgestoten versies”| Formaat | Versie |
|---|---|
| OpenDRIVE | 1.8 |
| OpenSCENARIO | 1.3 |
Overzicht van de scope
Section titled “Overzicht van de scope”Ondersteund: rechte wegen vanuit rijstroken; signalen, voetgangersoversteekplaatsen en kruispuntpatches als OpenDRIVE-objecten; één voertuig per pad dat een tijdgetraject volgt; een werkende esmini-zip die je direct kunt afspelen.
Nog niet ondersteund: OpenDRIVE-kruispunten, gebogen geometrie, wegen met meerdere rijstroken, weghoogte; OpenSCENARIO-snelheidsacties, rijstrookwisselingen, verkeerslichtlogica, interactie tussen meerdere actoren of enige snelheidsregeling per voertuig.
Zie ook
Section titled “Zie ook”- Exporter-architectuur — wat de pijplijn doet tussen snapshot en bestand.
- Een doelformaat toevoegen — koppel CARLA, SUMO, Unity of iets anders.