자율주행 그림에 수식 넣기
drawtonomy의 두 가지 핵심 기능 — 자율주행 형상(차선, 차량, 경로, 교차로)과 Math (KaTeX) 형상 — 을 동시에 활용하는 대표적인 사례입니다.
자율주행 연구 논문에서 이 패턴은 생각보다 자주 등장합니다. 시나리오 그림만으로는 부족합니다. 독자가 기호와 현실 세계를 연결할 수 있도록 그림 안에 비용 함수, 제어기, 운동학 갱신식을 함께 보여줘야 합니다.
KaTeX로 렌더링된 수식은 캔버스 위의 일반 형상으로 존재합니다. 차선·차량·경로 옆에 배치하면 단일 독립 그림을 완성할 수 있습니다.
어떤 상황에서 유용한가
섹션 제목: “어떤 상황에서 유용한가”- 경로 예측. 자차의 미래 경로 세 개를 표시하고, 옆에 모델의 손실 함수를 조판해서 보여줍니다.
- 모션 플래닝. 차선 장면에 후보 경로를 그리고, 플래닝 목적 함수
\min \sum_t \| x_t - x_t^{ref} \|^2 + \lambda u_t^2를 나란히 렌더링합니다. - 제어. 커브를 추종하는 차량 옆에 피드백 제어기 수식과 관련 기하 요소를 함께 배치합니다.
- 인식 평가. 차선·보행자 장면에 IoU 또는 AP 지표 수식을 표시합니다.
- 행동 모델. 보행자 횡단 장면 옆에 사회력(social-force) 또는 IDM 수식을 렌더링합니다.
각 경우 모두 수식은 캡션이 아니라 그림 자체의 일부입니다.
drawtonomy 작업 흐름
섹션 제목: “drawtonomy 작업 흐름”-
장면을 먼저 그립니다. Lane Tool로 차선, 차량 템플릿으로 차량, Path 도구로 경로를 배치합니다. 방법은 첫 번째 차선 그리기 튜토리얼과 동일합니다.
-
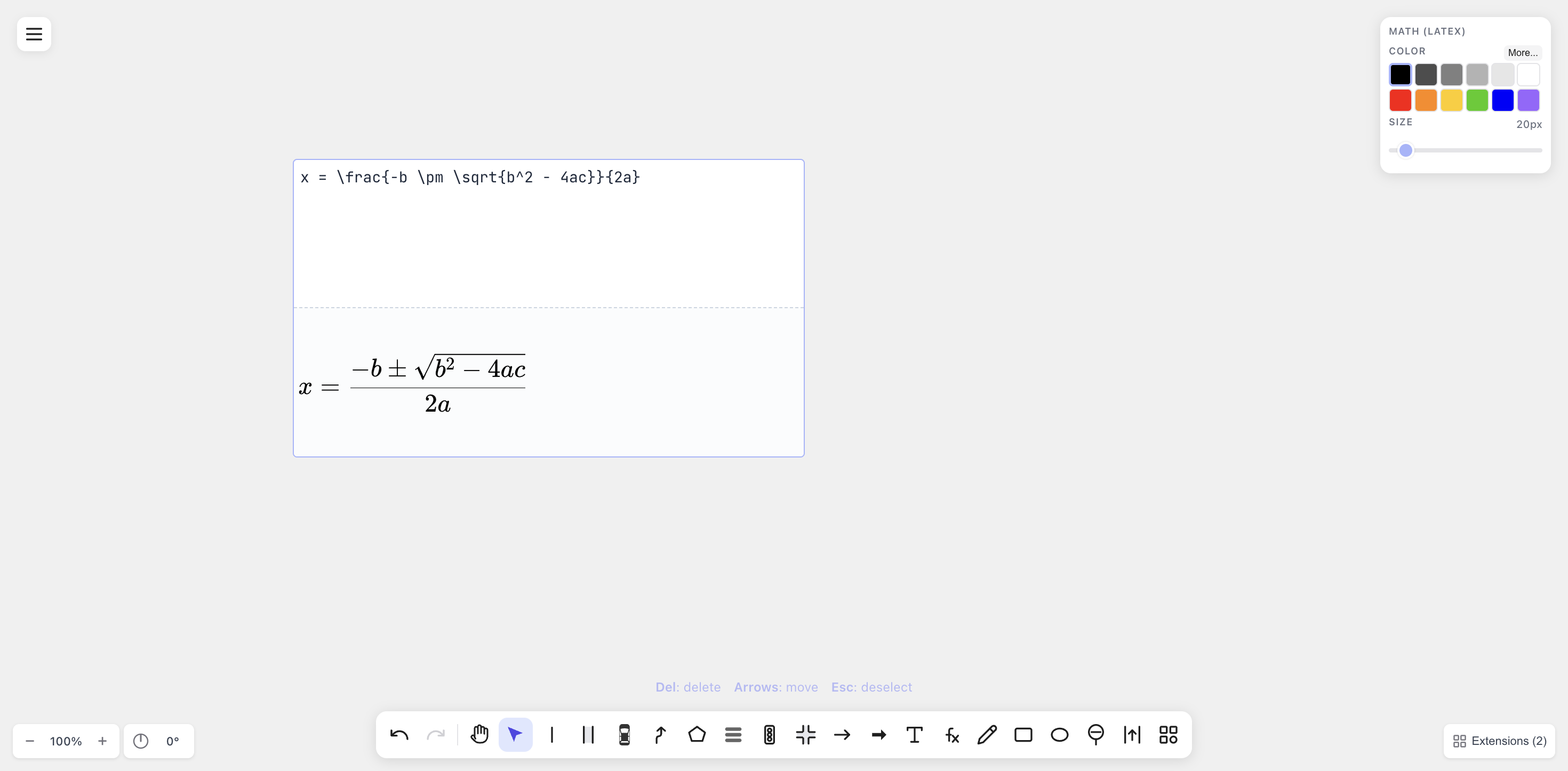
Math(
fx) 도구로 수식을 배치합니다. 장면 위·아래 또는 옆에 읽기 편한 위치를 선택합니다.
Math 도구는 하단 툴바의 Text 도구 옆에 있습니다.
/키가 단축키입니다. -
기호와 장면을 연결합니다. LineArrow나 Text 형상으로 수식의
x_t가 캔버스의 어떤 차량을 가리키는지 표시합니다. Snap 기능을 사용하면 화살표가 형상의 경계에 정확히 붙습니다. -
PDF로 내보냅니다.
\includegraphics{...}로 논문에 삽입합니다. 수식 글리프와 차선·차량 경로가 동일 파일 안의 벡터로 존재합니다.
실용 팁
섹션 제목: “실용 팁”- 수식 크기를 장면 크기에 맞춥니다. 600 px 차선 다이어그램 옆에 20 px 수식은 보이지 않습니다. 저널 그림 배율에서 잘 읽히려면 크기 슬라이더를 32 – 48 px로 올리세요.
.drawtonomy.svg원본을 보관합니다. 리뷰어가\sigma를\rho로 바꿔달라고 하면 수식을 더블클릭해 다시 입력하면 됩니다. 차선과 차량은 그대로 유지됩니다.- 수식 번호와 캡션 번호 분리. 그림 안에 수식이 여러 개이고 번호를 붙이고 싶다면
\begin{align}을 사용하세요.(1)(2)(3)번호가 렌더링된 SVG의 일부가 됩니다. 그렇지 않으면 논문의\label{}시스템이 그림 내부 수식을 참조할 방법이 없습니다. - 색으로 강조할 때. 수식의 특정 항을 다른 색으로 표시하려면 Math 형상 두 개를 나란히 배치하세요(하나는 검정, 하나는 빨강). drawtonomy는 하나의 수식을 단일 형상으로 렌더링하므로 토큰별 색 지정은 지원되지 않습니다.