在自动驾驶场景图旁放置公式
drawtonomy 有两大核心功能:自动驾驶图形(车道、车辆、路径、交叉口)和 Math (KaTeX) 公式图形。这个用例把两者结合在同一张图里,在自驾研究论文中出现的频率远超想象。
读者不只是想看驾驶场景的示意图,他们还需要看到描述该模型的公式——代价函数、控制器、运动学更新——这样才能把符号和场景中的实体对应起来。
KaTeX 渲染的公式以普通图形的形式存在于画布上——把它放到车道、车辆、轨迹旁边,就能生成一张完整的论文配图。
- 轨迹预测。 画出自车的三条预测路径,旁边排版模型的损失函数。
- 运动规划。 在车道场景中展示候选轨迹,并在旁边渲染规划目标
\min \sum_t \| x_t - x_t^{ref} \|^2 + \lambda u_t^2。 - 控制。 展示车辆跟随弯道的过程,旁边配上反馈控制器公式及相关几何关系。
- 感知评估。 在车道或行人场景旁展示 IoU 或 AP 指标公式。
- 行为模型。 在行人过街场景旁渲染社会力模型或 IDM 公式。
每种情况下,公式都是图片的一部分,而不是说明文字。
drawtonomy 操作流程
Section titled “drawtonomy 操作流程”-
先画场景。 用 Lane Tool 画车道,从 Vehicle 模板插入车辆,用 Path 工具画轨迹——与你的第一个三车道教程完全一致。
-
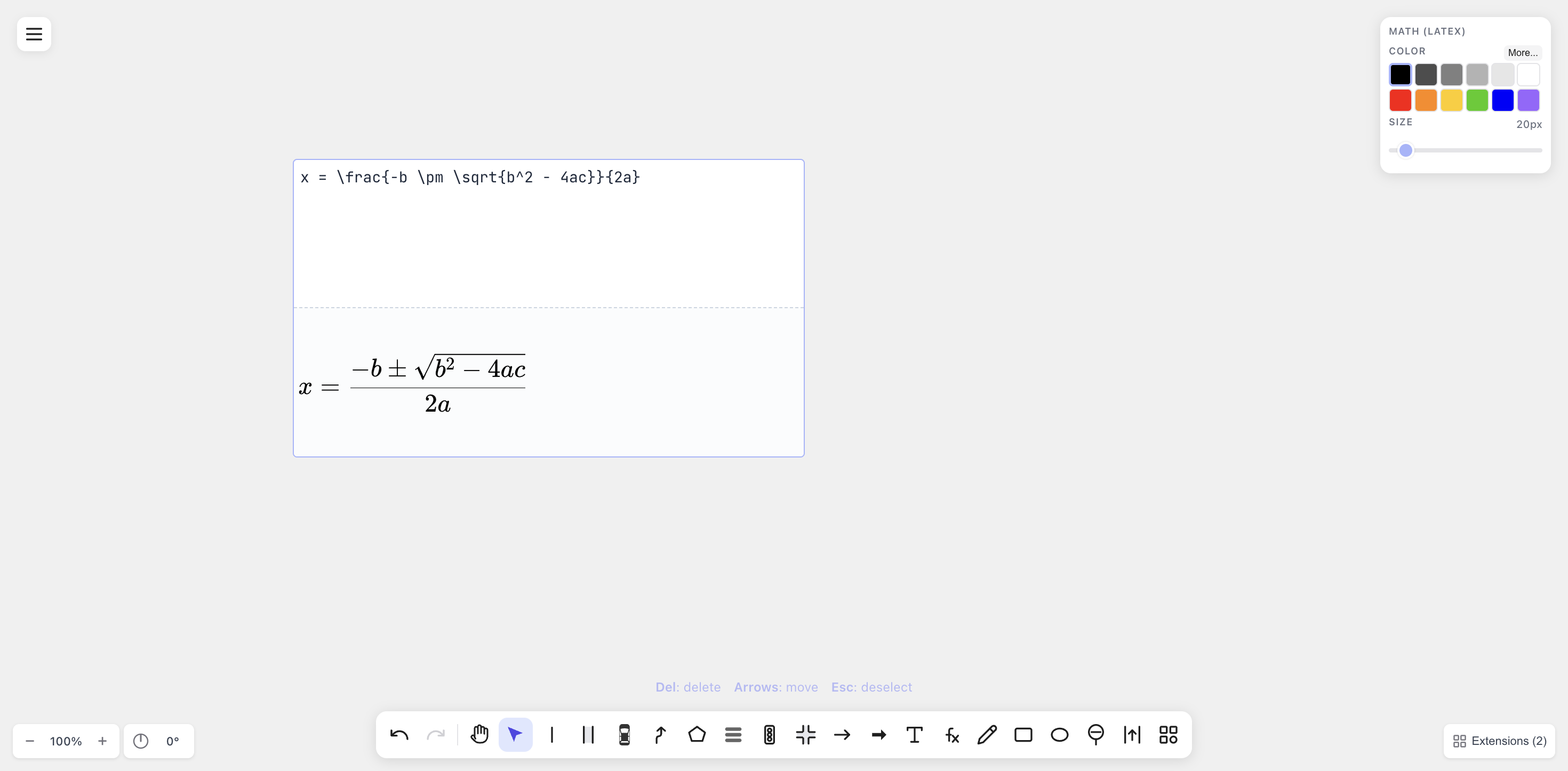
用 Math(
fx)工具放置公式。 把它放在清晰易读的位置——通常是场景上方、下方或侧边。
Math 工具位于底部工具栏的 Text 工具旁——键盘快捷键是
/。 -
将符号与场景关联。 用 LineArrow 或 Text 图形,把公式中的
x_t等变量指向画布上对应的车辆。drawtonomy 的 Snap 功能可让箭头精准吸附到图形的任意边。 -
导出 PDF。 用
\includegraphics{...}插入论文,公式字形和车道/车辆路径全部以矢量形式保存在同一文件中。
- 公式尺寸要与场景匹配。 600 px 的车道图旁放一个 20 px 的公式几乎看不见。建议把 Size 滑块调到 32–48 px,以满足期刊图片的阅读要求。
- 保存
.drawtonomy.svg源文件。 当审稿人要求把\sigma改成\rho时,只需双击公式重新输入,车道和车辆不会移动。 - 公式编号与图注编号。 如果图中有多个公式且需要编号,使用
\begin{align},这样(1)(2)(3)的编号会直接渲染进 SVG。否则,论文的\label{}系统无法引用图片内部的公式。 - 用颜色突出关键项。 如果想给公式中某个词项单独着色,需要用两个相邻的 Math 图形(一黑一红)——drawtonomy 将一个公式渲染为单一图形,不支持逐词着色。